
Automation
자동화장비
공장자동화란 제품의 계획·설계·생산준비에서부터 생산의 제어·관리·운용 등을 자동화하는 시스템으로써 생산자동화·유연성·생산력 향상을 목적으로 로봇과 컴퓨터를 이용한 생산설비를 통신·운반장비 등과 연결해 컴퓨터의 제어에 따라 다양한 크기·종류의 제품을 동시에 생산·조립·검사·포장하는 일괄생산 공정체제인 FMS(가변공정시스템)
액스노바 웹사이트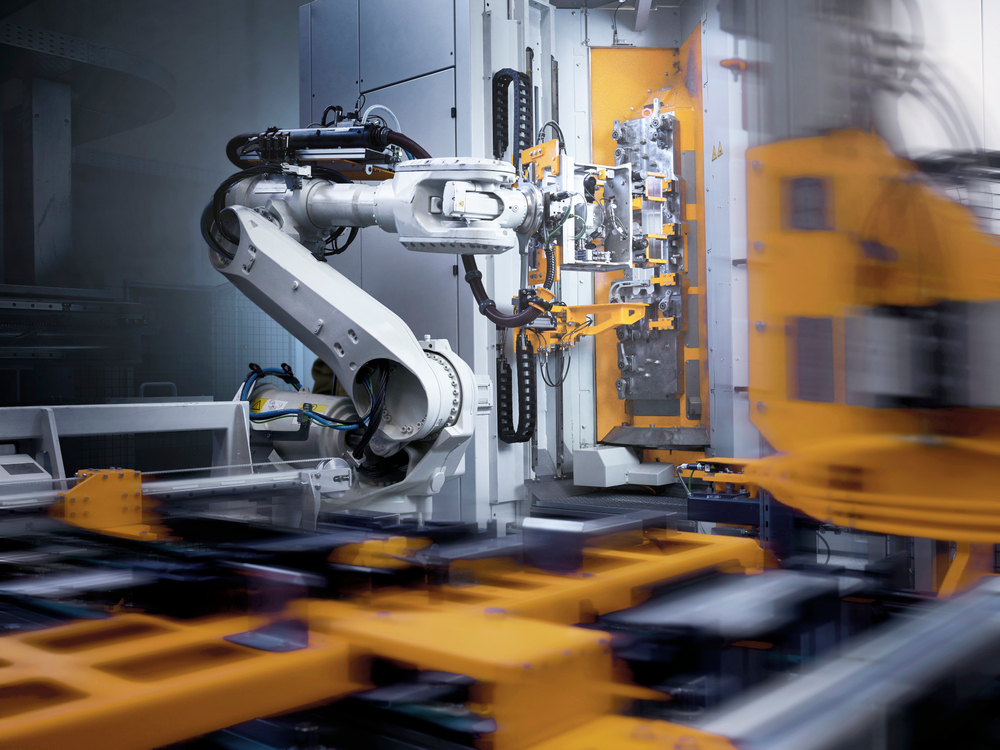


Co Robot
협동로봇은 코봇(Cobot)이라고도 불리며 작업자와 로봇이 같은 공간에서 함께 작업하기 위해 설계된 로봇을 의미한다. 협동로봇은 작업자를 대체하기 위한 로봇이 아닌 작업자와 함께 일하면서 작업효율과 생산성을 극대화할 수 있는 로봇과 인간의 협력 모델을 의미한다
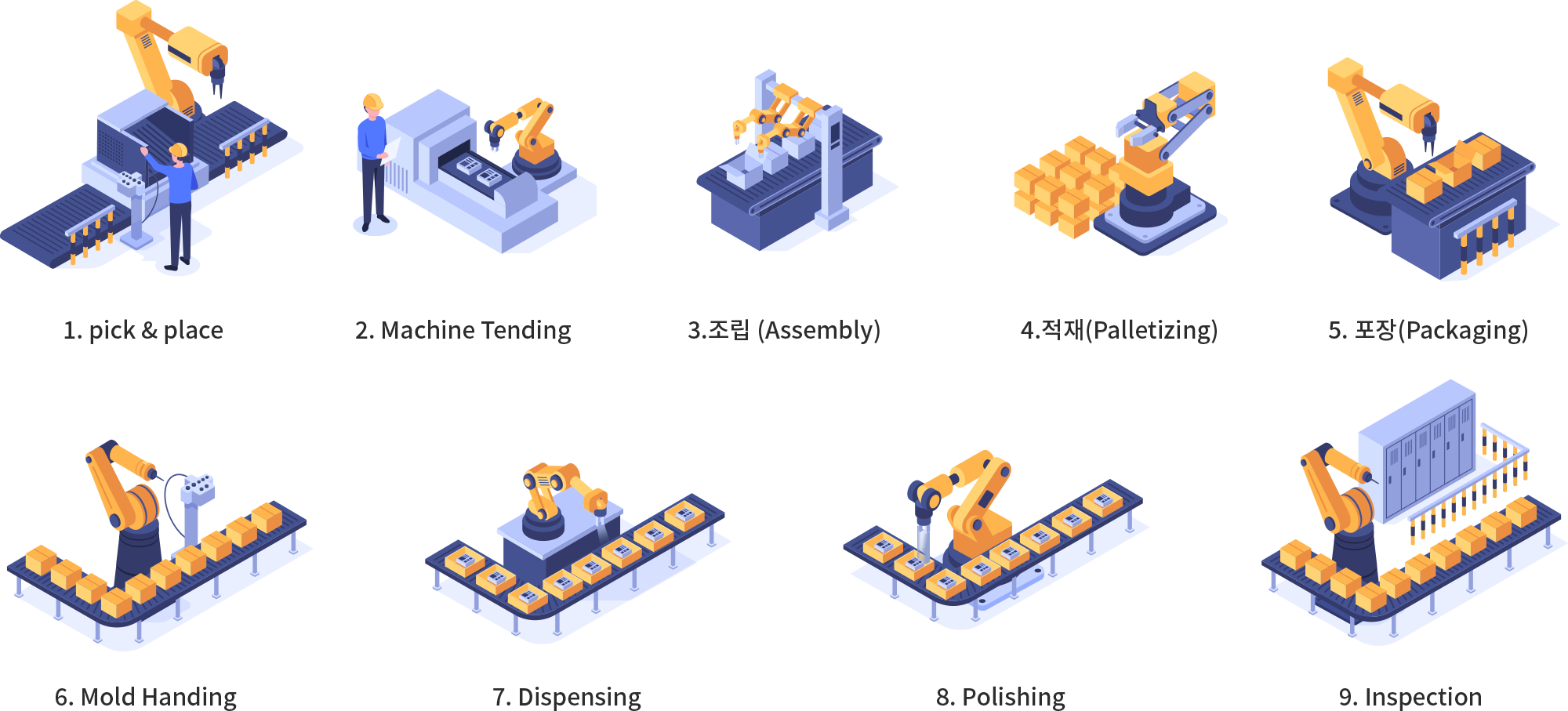
Co Robot Process
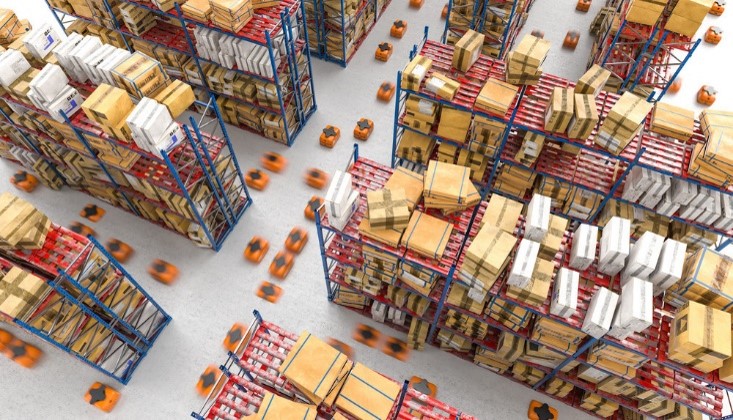


Transfer Robot
AGV
AGV는 전선, 마그네틱 띠 또는 센서에 의해 안내되는 고정 경로에서 작동합니다.
이러한 경로는 미리 정의되어 있으며 광범위한 설치가 필요하므로 비용이 많이 들고 생산에 차질을 빚 을 수 있습니다.
AGV는 최소한의 온보드 인텔리전스만 탑재되어 있으며 간단한 프로그래밍 지 침만 따를 수 있습니다.
장애물을 감지할 수는 있지만 장애물 주변을 탐색할 수는 없으므로 장 애물이 제거될 때까지 멈춥니다.
AGV의 고정 경로를 변경하려면 추가 비용과 중단이 발생합니다.
AMR
이와는 대조적으로 AMR은 지능형 내비게이션 기능을 갖추고 있습니다.
MiR의 자율 이 동 로봇과 마찬가지로 카메라, 센서, 레이저 스캐너와 함께 정교한 소프트웨어를 사용하여 정 교한 소프트웨어를 사용하여 지도를 구성하고 자율적으로 탐색합니다.
AGV와 달리 AMR은 고 정된 경로에 의존하지 않습니다. 장애물을 감지하고 최적의 대체 경로를 선택해 장애물 주변을 안전하게 이동할 수 있습니다.
이를 통해 자재 흐름이 중단되지 않고 생산성을 최적화할 수 있 습니다.
AMR의 지능형 내비게이션은 동적 환경에 대한 AMR과 AGV의 고려 사항에서 선호되는 선택입니다.